从SNE到t-SNE
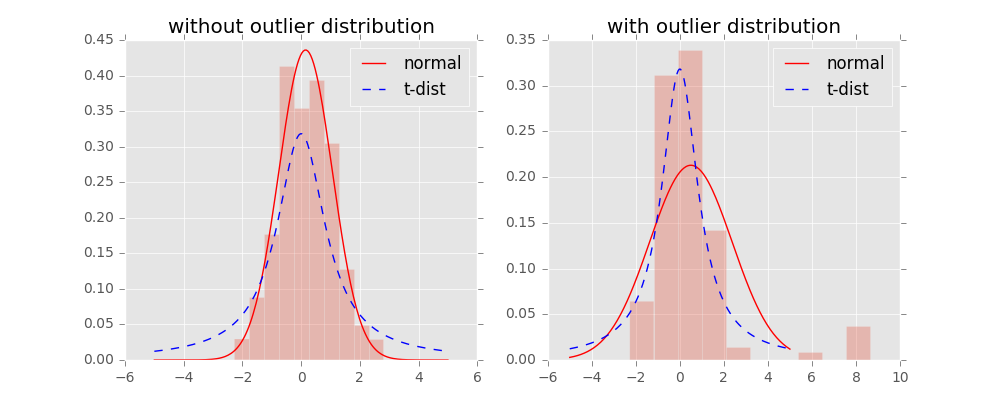
t-SNE 算法对每个数据点近邻的分布进行建模,其中近邻是指相互靠近数据点的集合。在原始高维空间中,我们将高维空间建模为高斯分布,而在二维输出空间中,我们可以将其建模为 t 分布。该过程的目标是找到将高维空间映射到二维空间的变换,并且最小化所有点在这两个分布之间的差距。与高斯分布相比 t 分布有较长的尾部,这有助于数据点在二维空间中更均匀地分布。
Preparation
条件概率:

1. SNE
高维:
先把欧氏距离转化为条件概率。条件概率定义为$x_j$对于$x_i$的相似性。
假设一个高斯分布以$x_i$为中心,则条件概率:

即为在以$x_i$为中心的高斯分布下,若以邻域的概率密度成比例地选取邻域,$p_{j|i}$为$x_i$选择$x_j$作为近邻的概率。
这个条件概率分布函数是一个softmax函数,变量是点的相似度,这个相似度通过欧氏距离来定义。
设定 $p_{i|i} = 0$。
低维:
构建与高维相似的分布将计算条件概率 $q_{j|i}$ 中用到的高斯分布的方差设置为 1/2。
.png)
设定 $q_{i|i} = 0$。
目标:
让p、q的条件概率分布尽可能相似。通过最小化高低维分布之间的 KL散度。
通过梯度下降法进行迭代更新。
.png)
关于 KL散度 的进一步说明
KL散度具有不对称性,即在低维映射中不同的距离对应的惩罚权重是不同的。具体地,距离远的两点来表达距离近的两代男会产生很大的cost,而距离近的两点来表达距离远的两点则产生较小的cost,cost就是KL散度的结果C。
举个例子,假如高维中 $p_{j|i} = 0.8$,若在低维中用较小的 $q_{j|i} = 0.2$ 来表示它的话, $cost = 1.11$。反之,如果高维中,$p_{j|i} = 0.2$, 低维 $q_{j|i} = 0.8$, 则 $cost = -0.277$。
因此,SNE倾向于表达局部信息。
困惑度
困惑度与之前提到的高斯分布中的方差$\sigma_i$的确定有关。它是随 $\sigma_i$ 单调递增的。
条件概率矩阵 P 任意行的困惑度定义为:
.png)
其中 $H(P_i)$ 为 $P_i$ 的香农熵,即表达式如下:
.png)
困惑度的设置来确定高斯分布方差
在 SNE 和 t-SNE 中,困惑度是我们设置的参数(通常为 5 到 50 )。困惑度随着熵增而变大,因此如果我们希望有更高的困惑度,那么所有的 $p_{j|i}$(对于给定的 i)就会彼此更相近一些。
为了达到相应的困惑度,我们就得利用困惑度与 $\sigma_i$ 单调递增的关系去进行二分查找,然后确定一个最优的 $\sigma_i$,从而达到我们要设置的困惑度值。于是$\sigma_i$就通过这个过程被确定下来了。
2. 对称SNE
SNE的条件概率对于 $p_{j|i}$ 和 $p_{i|j}$ 是不对称的,它的梯度实现起来比较困难。对称SNE是为了解决SNE梯度实现困难的问题。对称SNE使用了联合概率分布,取缔了条件概率分布。
高维
定义新的联合概率分布 $p_{ij}$ 是原来的条件概率分布 $p_{j|i}$ 和 $p_{i|j}$ 两项的均值。这样实现了$p_{ij} = p_{ji}$。
低维
低维中同样变成了联合概率分布,具体做法:把SNE中的分母做了改动,现在分母中的求和是对整个矩阵进行的。
.png)
优化求解
对称SNE 最小化 $p_{ij}$ 和 $q_{ij}$ 的联合概率分布与 $p_{i|j}$ 和 $q_{i|j}$ 的条件概率之间的 KL 散度。
对称SNE的梯度变简单了。
3. t-SNE
t-SNE使用了对称SNE,高维空间是之前的高斯分布,低维空间采用了t分布。
假设 $q_{ij}$ 服从自由度为1的 t分布,t-分布是一个长尾分布。
- t分布相对高斯分布比较矮宽,t分布让高维空间中中低距离在映射后能有一个较大的距离。
- t分布尾部更高,受异常值的影响更小。
- t分布自由度越大,越接近高斯分布。
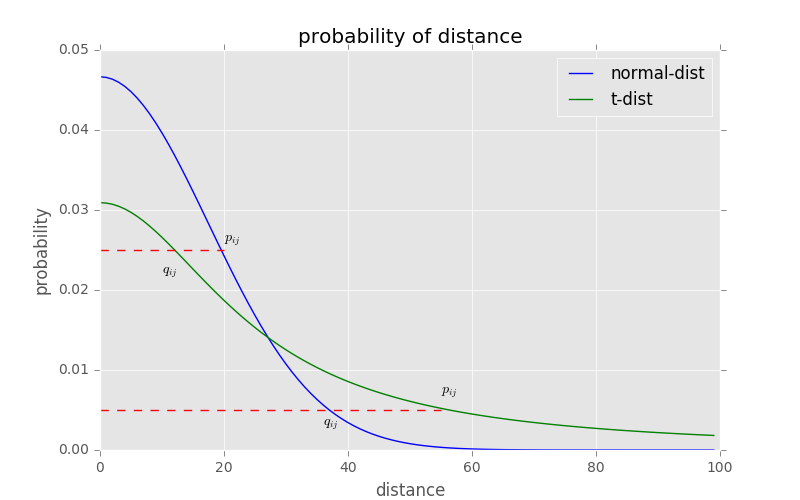
如上图所示,是高斯分布与t分布的对比。横轴表示点之间距离,纵轴表示相似度(联合概率)。t分布代表低维空间,高斯分布代表高维空间。
t分布实现了簇内聚集,簇间疏远的特点:
- 对于相似度大的点,t分布在低维空间的距离更小;
- 对于相似对小的点,t分布在低维空间中的距离更大;
低维空间的t分布定义
使用自由度为1的t分布来重新定义 $q_{ij}$.
$q_{ij}=\frac{ (1 + \left | y_i-y_j \right |^2)^{-1}}{\sum_{k \neq l} (1 + \left | y_k-y_l \right |^2)^{-1}}$
梯度变为:
$\frac{\delta C}{\delta y_i}=4\sum_{j}(p_{ij}-q_{ij})(y_i-y_j)(1 + \left | y_i-y_j \right |^2)^{-1}$
拥挤问题
当我们试图将一个高维数据集表征为 2 或 3 个维度时,很难将邻近的数据点与中等距离的数据点区分开来,因为这些数据点都聚集在一块区域。再比如,假如一个三维球体内部均匀分布了很多点,如果想把所有点直接投影到同一个二维平面上,那会有很多点是重合的。
t-分布用来解决拥挤问题的思路:假如我们想把之前球体内的所有点的信息尽可能都表达出来,可以把由于投影所重合的点用不同的距离表示,其中距离的差别很小,这样原来在那些距离上的点会被赶到更远的地方。
t分布的长尾特性意味着:距离更远的点依然能给和高斯分布下距离小的点相同的概率值,从而达到高、低维空间对应点概率相同的目的。
References
[2]t-SNE完整笔记
[3]t-SNE分析的原理

